
I - Raccordement d’un automate programmable.
EXERCICE 1 :
Question n°1 :
Décrire cet automate en nommant ces différentes parties ?
• N°1=
• N°2=
• N°3=
• N°4=
• N°5=
• N°6=
• N°7=
• N°8=

Fig 1
Question n°2 :
Nommer les différentes parties de cet automate monobloc?
• N°1=
• N°2=
• N°3=
• N°4=
• N°5=
• N°6=
• N°7=
• N°8=

Fig. 2
EXERCICE 2 :
Question : Reconnaître parmi ces figures les modules analogiques, des modules tout
ou rien?(entrée/sortie).

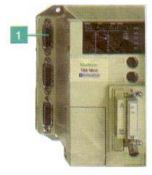
Fig. 1

Fig. 2
EXERCICE 3 :
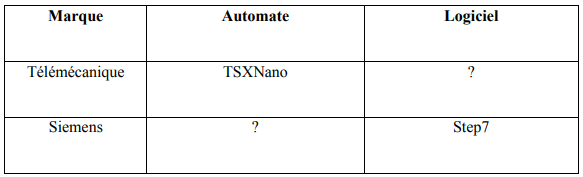
Nommer le logiciel approprié à chaque marque d’automate suivant ?:
I.1. Objectif(s) visé(s) :
- Distinguer les entrées des sorties de l’automate.
- Câbler l’automate.
I.2. Matériel (Équipement et matière d’œuvre) par équipe :
Équipement :
- Un automate.
- Un contacteur.
- Un bouton poussoir marche et un bouton poussoir arrêt.
I.4. Description du TP :
- Câbler sur l’automate l’exemple suivant d’un démarrage direct :


EXERCIC 1 :
Question 1 : Distinguer entre les langages de programmation.


Le graphe : Réponse :
EXERCIC 2 :
Question : Remplir le tableau suivant :
 Que représente :
Que représente :


EXERCIC 3 :
Question n°1 :
Donner la marque et la référence de l’automate utilisé ?
Question n°2 :
Comment allez-vous procéder pour écrire le syntaxe d’ :
- Une entrée automate ;
- Une sortie automate ;
- Un bit système ;
- Un bit interne ;
- Un bloc fonction temporisateur ?
Question n°3 :
Que signifie les instructions suivantes :

Question n°4 :
Cocher la bonne réponse :

Question n°5 :
Donner la définition des objets suivants :
%I1.0 :………………………………………………………
%M12 :………………………………………………………
%Q204.61 :………………………………………………
%TM1.Q :……………………………………………………
%TM2.V :…………………………………………………
SR0 :…………………………………………………
%Q4.5 :4 ………………………………………………….
EXERCICE 4:
Faites une programmation en ladder de charge de charge suivant.
Un chariot initialement à gauche effectue le déplacement suivant :
- déplacement à droite jusqu'à fin course droite
- retour à sa position initiale
Entrées :
- Fin course droite
- Fin course gauche
- Bouton poussoir marche
- Bouton arrêt
Sorties :
- Bobine gauche
- Bobine droite
TP: Utilisation d’un logiciel de programmation
I.1. Objectif(s) visé(s) :
- Configuration de l’automate
- Adressage des E/ S
- Le choix du mode de programmation
- Le passage en mode en ligne
I.2. Matériel (Équipement et matière d’œuvre) par équipe :
Équipement :
- Un automate
- UN P C compatible
I.3. Description du TP1 :
Question N°1 : Décrire la démarche d’installation de logiciel de programmation
utilisé ?
Question N°2 : Programmer le réseau suivant

Fixer le temps de présélection du temporisateur à 50 ms.
Question 3: Comment vous passer en mode RUN (exécution) ?
I.4. Description du TP2 :
A)
1/ Lancez le PL7 MICRO .
2/ Créez une nouvelle application automate en lui donnant un nom .
3/ Choisissez un processeur TSX37XX (Activez l’option Grafcet ) .
4/ Faites une configuration matériel en tenant compte des modules d’entrée - sortie
existantes et de leur emplacement.
5/ Faites une configuration logicielle pour définir le nombre de temporisateurs ,
monostables ,
compteurs aussi la taille des zones de variables .
6/ Faites une configuration des objets Grafcet.
B)
1/ Faites activer l’option démarrage automatique en RUN de l’automate en mode non
connecté/configuration.
2/ Faites régler l’horodateur de l’automate en mode connecté/mise au point .
3/ Essayez d’enlever la pile de l’automate (opération à faire hors tension ) ,consultez le
DIAG
du mise au point (sous tension et en mode connecté/mise au point ) qu’est ce qu’on
on remarque ?.
I.5. Description du TP3 :
1/ Créer une nouvelle section en langage ladder (LD) en lui donnant un nom .
2/ Instructions de chargement booléennes:
2-1/ Visualiser l’état de l’entrée %I3.0 sur la lampe de sortie %Q3.8.
2-2/ Visualiser l’état inverse de l’entrée %I3.1 sur la lampe de sortie %Q3.9.
2-3/ Visualiser le passage à l’état 1 de l’entrée %I.
3.2 sur la lampe de sortie %Q3.10.
2-4/ Visualiser le passage à l’état 0 de l’entrée %I.
3.3 sur la lampe de sortie %Q3.11.
I.6. Description du TP4 :
Durée du TP4:
1/ Instructions d’affectation booléennes :
1-1/ Affecter l’état de %I3.4 à la sortie %Q3.12.
1-2/ Affecter l’inverse de l’état de %I3.5 à %Q3.13 et son état à %Q3.12.
1-3/ Mémoriser le passage à l’état 1 de %I3.6 dans %Q3.14.
1-4/ Mémoriser le passage à l’état 0 de %I3.7 dans %Q3.15.
I.7. Description du TP5 :
1/
Arrêt = %I3.0
Marche = %I3.1
Bobine = %Q3.8
1-2/ Prendre en compte la signalisation de l’état du moteur :
- Sur une lampe l’état de marche = %Q3.9
- Sur une autre lampe l’état d’arrêt = %Q3.10
2/
2-1/ Réaliser un programme en langage ladder pour une commande de marche manuelle
d’un Moteur à deux sens de marches (avant et arrière ) M2 .
Arrêt = %I3.2
Marche avant = %I3.3
Marche arrière = %I3.4
Commande marche_av = %Q3.11
Commande marche_ar = %Q3.12
2-2/ Prendre en compte la signalisation de l’état du moteur :
- Sur une lampe verte l’état de marche _ avant = %Q3.13
- Sur une lampe orange l’état de marche _ arrière = %Q3.14
- Sur une lampe rouge l’état d’arrêt = %Q3.15
I.8. Description du TP6 :
Nous avons une grande machine qui a une porte de sécurité qui fait accès à un moteur
central dans cette machine M.
1/ La commande du moteur se fait par un bouton de marche et un bouton d’arrêt .
L’ouverture de la porte de sécurité doit bloquer le démarrage du moteur M.
2/ Si au cours du fonctionnement , une personne ouvre la porte de sécurité :
2-1/ Le moteur M doit s’arrêter .
2-2/ Une alarme doit se déclencher.
2-3/ Cette alarme doit être acquitter par l’opérateur par un bouton pousoir.
3/ Nous voulons que l’opérateur puisse arrêter le moteur en cas d’urgence par des arrêts
d’urgences situés aux différents points de l’usine (quatre arrêts d’urgences ) et que le
moteur ne démarre que si on relâche l’arrêt d’urgence.
4/ Nous désirons que l’opérateur puisse localiser lequel des arrêts d’urgence est activé pour
pouvoir l’éliminer pendant les conditions normaux .
BP marche = %I3.0
BP arrêt = %I3.1
FDC Ouverture Porte = %I3.2
BP acquittement défaut = %I3.3
Arrêt d’urgence n° 1 = %I3.4
Arrêt d’urgence n°3 = %I3.6
Arrêt d’urgence n°4 = %I3.7
Commande moteur M = %Q3.8
Alarme = %Q3.9
Signalisation A.U 1 =%Q3.11
Signalisation A.U 2 =%Q3.12
Signalisation A.U 3 =%Q3.13
Signalisation A.U 4 =%Q3.14
I.9. Description du TP7 :
On mesure le niveau de liquide dans une cuve à l’aide d’une entrée analogique configurée en
0-10V.
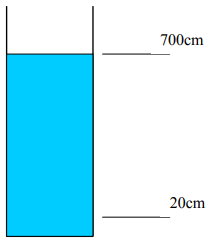
Le niveau haut (700 cm )
correspond à une valeur lue
=10000 (10V) sur l’entrée
analogique .
Le niveau bas (20cm) correspond à
une valeur lue = 0 sur l’entrée
analogique.
Il vous est demandé de calculer le niveau de la cuve en cm en fonction de la valeur lue
(0-10000 mV) sur l’entrée analogique .
Essayez d’utiliser un potentiomètre pour simuler le signal 0-10V du capteur de niveau , est un
voltmètre à la sortie pour visualiser la sortie analogique , suivant le câblage suivant :


La relation entre le niveau de la cuve (en cm ) et la mesure analogique en (mV) est la
suivante :
Y = X a / b + c
 EXERCICE 2:
EXERCICE 2:

EXERCICE 3:
Y : la valeur mise à l’échelle (à ranger dans %mw100)
a : l’échelle physique (700-20 = 680 )
b : la résolution de l’entrée analogique (10000)
c : l’offset (20)
Utilisez une table d’animation pour visualiser %MW100 .
I.10. Description du TP8 :
1/ Nous vous proposons de réaliser la gestion de deux feux rouge selon le descriptif suivant :
Etape 0 : F1 Rouge , F2 Vert
Etape 1 : F1 Rouge , F2 Orange après 5s
Etape 2 : F1 Rouge , F2 Rouge après 3s
Etape 3 : F1 Vert , F2 Rouge après 2s
Etape 4 : F1 Orange , F2 Rouge après 5s
Etape 5 : F1 Rouge , F2 Rouge après 3s
Etape 0 : F1 Rouge , F2 Vert après 2s
2/ Nous voulons donner accès au policier pour passer par un switch SW1 du mode
automatique au mode manuel .
En mode manuel :
- le cycle se bloquera à l’étape où il se trouve .
- le policier passera d’une étape à l’autre par l’activation d’un switch SW2.
3/ Le policier désir accéder directement aux étapes 0 et 2 par un switch SW3 .
4/ Le policier désir accéder directement a l’étape 3 par un switch SW4 .
SW1 = %I3.0
SW2 = %I3.1
SW3 = %I3.2
SW4 = %I3.3
F1 Rouge = %Q3.8
F1 Orange = %Q3.9
F1 Vert = %Q3.10
F2 Rouge = %Q4.8
F2 Orange = %Q4.9
F2 Vert = %Q4.10
III - Diagnostic des problèmes de fonctionnement d’un automatisme simple
commandé par un automate.
EXERCICE 1 :
QUESTION N° 1 :
- Quel est l’état du bouton RUN, situé sur la face avant de l’automate, quand ce dernier est
en mode RUN (Exécution du programme).
QUESTION N° 2 :
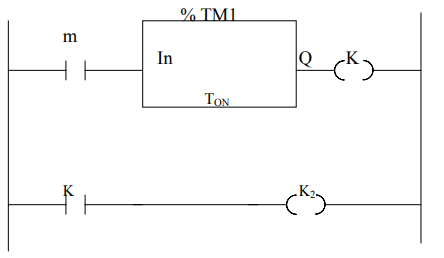
- Compléter le tableau suivant :

Il s’agit de cet exemple , on constate que la sortie K2 ne fonctionne pas
Analyser le problème en citant toutes les causes possibles pouvant être la source de non
fonctionnement de cet automatisme.
1/
1-1/ Réaliser un programme en langage ladder pour une commande de marche manuelle
d’un Moteur à un seul sens de marche M1 .
Arrêt = %I3.0
Marche = %I3.1
Bobine = %Q3.8
1-2/ Prendre en compte la signalisation de l’état du moteur :
- Sur une lampe l’état de marche = %Q3.9
- Sur une autre lampe l’état d’arrêt = %Q3.10
2/
Modifier le programme pour avoir un fonctionnement en deux sens.
IV - L’essai d’un automatisme simple commandé par un automate
EXERCICE 1:
Question n°1 :
Citer certains dangers causés par le forçage des entrées / sorties.
Question n°2 :
Dans le démarrage à double sens de rotation, comment se fait le verrouillage par logiciel et
le verrouillage matériel (mécanique) ?
EXERCICE 2 :
- Programmer le démarrage étoile triangle d’un moteur asynchrone.
- Après avoir câblé les entrées et les sorties effectuer l’essai en laissant l’automatisme
fonctionner pendant 1 heure.
- Si le système ne fonctionne pas déceler la panne ; changer l’élément défectueux et refaire
l’essai.
Evaluation de fin de module :
EXERCICE N° 1
Nous avons une machine à deux moteurs M1 et M2 de telle façon que M2 démarre
automatiquement après 15 s de marche du moteur M1 .
Faire un programme automate qui nous permettra de commander le démarrage et l’arrêt
des deux moteur à l’aide d’une switch Marche et Arrêt BP1 et BP2.
Noter que :
- Si le moteur M1 s’arrête avant les 15 s et redémarre , on doit réinitialiser la temporisation
.
- Si le moteur M1 s’arrête après les 15 s le moteur M2 doit s’arrêter immédiatement .
BP1: %I3.0
BP2: %I3.1
Commande M1 : %Q3.8
Commande M2 : %Q3.9
EXERCICE N° 2
Pour la sécurité de fonctionnement , on installe deux capteurs pour indiquer l’état
d’échauffement de chaque Moteur et une porte de sécurité pour le moteur M2 .
Nous voulons regrouper les sécurités de chaque moteur et que si on a un défaut de sécurité
pour un des deux moteurs :
- Le défaut de sécurité doit être maintenu jusqu’au disparition de la cause et acquittement .
- Le défaut de sécurité doit arrêter immédiatement le moteur correspondant .
- Le moteur M2 s’arrête soit après un défaut correspondant , soit après un arrêt continue de
3s du moteur M1 .
Sécurité du moteur M1 : %I3.2
Sécurité du moteur M2 : %I3.3
FDC Porte Ouverte M2 : %I3.4
Acquittement Défaut : %I3.5
EXERCICE N° 3
Pour réaliser un entretien périodique du moteur M1 nous voulons que l’automate bloque le
démarrage du moteur après 10 démarrages successifs et signale la demande d’entretien .
- Le blocage entretien devra être traité de la même manière qu’un défaut sécurité M1 .
- L’opérateur devra avoir accès à initialiser l’entretien et débloquer le démarrage de M1par
bouton poussoir BP3 .
BP3 : %I3.6
Demande entretien : %Q3.10
EXERCICE N° 4
L’opérateur demande que le signal de demande d’entretien soit du type clignotement de
telle manière qu’il soit 4s allumé et 2s éteint .

Liste bibliographique
- Documentation Télémécanique
- Séminaires A P I





Aucun commentaire:
Enregistrer un commentaire